2026年4月,北京亦庄的半程马拉松赛道上,一台名为“灵龙”的人形机器人正独自穿越公园的坡道和弯道。没有工作人员拿着遥控器跟在旁边,它完全依靠自己,在21.0975公里的开放赛道上完成了奔跑、转向和避障。仅仅一年前,这条赛道上的绝大多数机器人还需要人类“领航员”遥控操作,而今年,像“灵龙”这样能“自主跑”的队伍占比达到了四成。从“遥控跑”到“自主跑”,关键跃迁如何发生这种转变的核心,在于机器人获得了一种前所未有的能力:在复杂、开阔且动态变化的室外环境中,持续、精准地知道自己“在哪里”,以及“面朝哪个方向”
2026年4月,北京亦庄的半程马拉松赛道上,一台名为“灵龙”的人形机器人正独自穿越公园的坡道和弯道。没有工作人员拿着遥控器跟在旁边,它完全依靠自己,在21.0975公里的开放赛道上完成了奔跑、转向和避障。
仅仅一年前,这条赛道上的绝大多数机器人还需要人类“领航员”遥控操作,而今年,像“灵龙”这样能“自主跑”的队伍占比达到了四成。
从“遥控跑”到“自主跑”,关键跃迁如何发生
这种转变的核心,在于机器人获得了一种前所未有的能力:在复杂、开阔且动态变化的室外环境中,持续、精准地知道自己“在哪里”,以及“面朝哪个方向”。
这听起来像手机地图导航,但难度是几何级数增加的。手机地图漂移几米,你可能只是走错了路口;但一个以每秒数米速度奔跑的机器人,如果定位发生厘米级的持续偏移,结果就是直接撞上赛道围栏。
去年,长距离下的“导航漂移”和复杂地形下的定位失准,正是阻碍机器人摆脱遥控器的核心痛点。
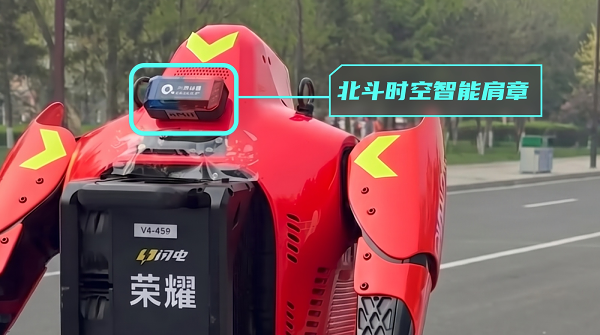
今年的赛场上,超过三分之二的自主奔跑机器人,体内都植入了一套名为“北斗时空智能三体套件”的系统。正是它,解决了上述致命问题。
给机器人装上“超精准的尺子和指南针”
这套系统的核心任务,是提供两样东西:厘米级的绝对位置,和极高精度的方向。
厘米级定位: 它通过融合天上的北斗卫星信号和地面上千个增强基站的数据,将动态定位精度控制在2厘米以内。这意味着,在开阔环境下,机器人对自己每一步踩在哪个坐标点上,误差不超过一枚硬币的直径。
0.1度高精度定向: 更关键的是方向感。系统集成的“灯塔”算法,能在1米长的基线上(可以理解为机器人两个“接收天线”的距离),实现0.1度的航向测量精度。
这好比给机器人装上了极度灵敏的“数字罗盘”,让它明确知道自己面朝的精确方向,在长距离奔跑中不会因为微小的方向累积误差而跑偏。
你可以把它想象成一个为机器人特制的、性能爆炸的“智能手环”。这个手环不再只记录步数,而是每时每刻都在回答两个根本问题:“我的中心点在地球表面的精确坐标是什么?”和“我的身体正指向哪个方位?”
“眼睛”、“耳朵”和“直觉”的协同作战
仅有精准的“尺子和罗盘”还不够。机器人奔跑的赛道充满不确定性:其他机器人、突然出现的障碍、卫星信号被树木或建筑短暂遮挡。
因此,当前的机器人采用了“组合导航”的策略,而北斗高精度时空信息,是这套组合的“定盘星”:
北斗(全局地图与坐标): 提供绝不漂移的全局时空基准,告诉机器人“你在地图上的绝对位置”,解决长距离基准问题。
激光雷达(局部细节扫描): 像敏锐的眼睛,实时扫描周围环境,构建身边几米到几十米的三维地图,用于避障和精细路径调整。
视觉导航与惯性导航(瞬时反应与补充): 像直觉和肌肉记忆。视觉识别语义信息(如道路边缘),惯性测量单元(IMU)在信号丢失的瞬间(如过隧道)提供短时位姿推算。
北斗在这里的角色,是为激光雷达和视觉看到的所有局部信息,赋予一个精准无比的“全局身份证”。没有这个基准,局部感知再灵敏,也可能在长跑中“迷失方向”。
超越赛场:从“奔跑”到“行走”的广阔未来
马拉松赛事是技术的极限测试场,而技术的真正价值在于走出赛场。北斗时空智能赋予机器人的“自主行走”能力,正在多个领域推开大门:
工业巡检: 在安徽合肥,搭载北斗的道路检测机器人,能将每公里路面的检测时间从人工的1天缩短到1小时,效率提升24倍。它依靠的正是北斗提供的毫米级检测基准。

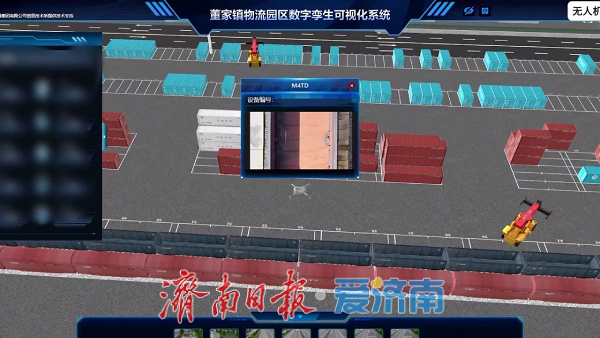
智慧物流: 在济南铁路物流园,基于北斗定位的无人转运车(IGV)与无人机协同,实现了集装箱的自动调度和搬运,将卡车入园通行时间从5分钟压缩至20秒。
应急救援与农业: 在无网络信号区域,北斗的短报文功能可成为机器人的“生命线”,回传位置信息。在农田,基于北斗导航的无人插秧机、收割机已能实现24小时不间断作业,播种行距误差可控制在±2厘米内。